UDMnt
1, 2 drives, 12-80V, up to 10/20A
EtherCAT ® Single & Dual Drive Module
-
Unique achievable performance
- Ultimate move & settle, jitter and robustness performance algorithms (optional): ServoBoostTMfor optimal servo performance and robustness to varying mechanical properties
- Advanced algorithm at standard configuration: PIV Cascaded Loop Structure with velocity and acceleration feed forward
-
Universal drive:
- 2 and 3 phase AC Servo / DC brushless motors with sinusoidal commutation
- DC Brush motors
- Voice coils motors
- Closed and open loop step motors
-
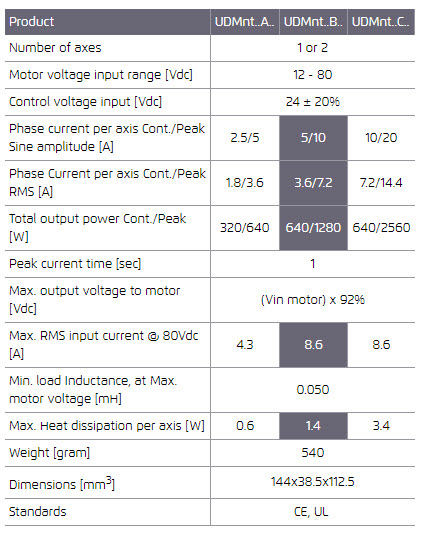
12Vdc to 80Vdc, up to 10A continuous and 20A peak current
-
Wide range of feedback interfaces:
- Digital incremental encoders
- SIN-COS analog encoder interface, supporting laser encoders with speeds >5MHz (optional)
- Absolute encoders (optional)
-
Comprehensive I/O:
- 4 general-purpose / Registration Mark inputs (high-speed position-capture inputs)
- 2 general purpose / motor brake outputs (24V, 0.1A)
- 2 PEG (Position Event Generator) outputs (high-speed position-based outputs)
- 2 analog inputs, ±10V
- 1 analog output, ±10V
-
Small footprint: 144x112.5x38.5 mm3
The UDMNT is a line of compact, panel-mounted EtherCAT modules with single / dual axis universal drives for servo, stepper, and voice-coil
motors with peak power of up to 1.3kW.
|

|
The UDMnt addresses the needs of demanding multi-axis motion applications with limited space, such as wafer-handling robots, wire bonders,
die bonders, electronics packaging, small manipulators, and table-top motion stages.
With the optional combination of a 5MHz laser encoder interface, the powerful ServoBoost and MotionBoost algorithms, demanding positioning systems achieve ultimate performance levels, such as speeds above 1m/s with position jitter below 3nm, almost zero settling time, and uncompromised system robustness with minimal sensitivity to disturbances and changes.
The UDMnt is a slave that runs under any ACS EtherCAT masters. A comprehensive set of software support tools are provided for module
configuration, setup and tuning.
Drives
Type: PWM with digital current control with field oriented control and space vector modulation.
Current ripple frequency: 40 kHz.
Current loop sampling rate: 20 kHz.
Programmable Current loop bandwidth: up to 4kHz, will vary with tuning & load parameters.
Commutation type: sinusoidal. Initiation with and without hall sensors.
Switching method: advanced unipolar PWM.
Supply
The drive must be supplied by two power sources.
A motor supply and a 24Vdc control & logic supply.
During emergency conditions there is no need to remove the 24Vdc control supply.
Motor Supply
Range: 12Vdc to 80Vdc.
Current rating should be calculated based on actual load.
Control supply
Control supply input voltage: 24Vdc ± 20%
Maximum input power: 15W
Max input current: 0.9A @ 24V
Motor Type
Two- and three-phase permanent magnet synchronous (DC brushless/AC servo), DC brush, Voice coil, Two- and three-phase stepper (micro-stepping open or closed loop), Five-phase stepper*. (*Consult ACS)
Feedback
Types: incremental digital encoders, optional Sin-Cos encoders
Incremental Digital Encoder:
One per axis, A&B,I; CLK/DIR,I.
Type: RS-422.
Max. rate: 50 million encoder counts/sec.
Sin-Cos Analog Encoder (optional):
One per axis.
Type: 1Vptp, differential.
Programmable multiplication factor: x4 to x4096.
Maximum frequency: 250kHz
Maximum acceleration with Sin-Cos encoder: 108 sine periods/second2.
Absolute Encoder (optional):
Two, EnDat 2.1/2.2, Smart- ABS, Panasonic, BiSS-C
Commutation Hall inputs:
A set of three per axis. Single-ended, 5V, opto-isolated.
Input current: <7mA.
Digital I/O
The Digital I/O are powered by a 24Vdc (default), 5V optional external supply
Safety Inputs:
Left and right limit inputs per axis.
24Vdc, single-ended, Sink or Source, opto-isolated.
Input circuit current: 4.1mA
Digital Inputs:
General purpose inputs:
Four, 24V, single-ended, source, opto-isolated.
Input current: 4.1mA.
Mark: Four
Digital Outputs:
General purpose outputs:
Two, 24V, single ended, sink or source (default), opto-isolated,
100mA per each output.
Note: other I/O configurations (source, 5V) are available upon request.
PEG: Two.
Analog I/O
Analog Inputs:
Two Inputs, ±10V, differential, 12 bit resolution.
Analog Outputs:
One output, ±10V, differential, 10 bit resolution
Drive Protection
Over voltage
Under Voltage
Phase-to-phase short circuit
Short to ground
Over current
Over temperature
Environment
Operating range: 0 to + 50°C
Storage and transportation range: -25 to +60°C
Humidity (operating range): 5% to 90% non-condensing
Communication
Two EtherCAT ports, In and Out, RJ45 connecto
Specifications
|
